

Saúl Martínez Díaz
Tecnológico Nacional de México/Instituto Tecnológico de La Paz
Resumen
Conocer la ubicación de un objeto con respecto a un punto de origen es de gran importancia en muchas aplicaciones como la navegación de vehículos autónomos. En este artículo se presenta una alternativa para estimar la distancia recorrida con respecto a un punto de origen utilizando técnicas de visión artificial.
Artículo
En muchas aplicaciones, para diversos propósitos, es importante conocer la ubicación de un objeto con respecto a un punto de origen; algunas de las más importantes son la navegación de vehículos autónomos, control industrial y robótica. Por ejemplo, en un automóvil es deseable conocer la distancia que se recorre al viajar por alguna carretera. Para ello, los automóviles cuentan con un instrumento de medición llamado odómetro. En ese caso, el odómetro suele contar la cantidad de vueltas que da una llanta y, considerando su diámetro, se estima la distancia recorrida. Algunos factores, como el desgaste de las llantas, topes, baches, etc., ocasionan errores en la estimación de la distancia recorrida; dichos errores se van acumulando con el tiempo. Una alternativa para estimar la distancia recorrida con respecto a un punto de origen es utilizar técnicas de visión artificial. Para ello se pueden utilizar un par de cámaras digitales y un método conocido como visión estereoscópica.
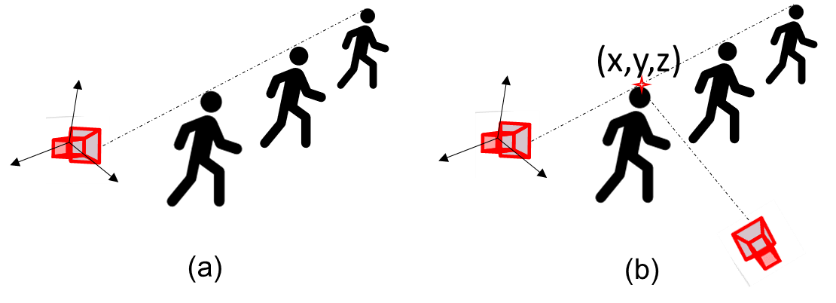
En una cámara, un objeto del mundo real en tres dimensiones es proyectado al plano de la cámara en 2 dimensiones, como se muestra en la figura 1. Un desplazamiento del objeto real hacia la izquierda, la derecha, arriba o abajo (es decir, en las coordenadas x, y) se verá reflejado como un desplazamiento en el plano de la imagen. Si en la secuencia de imágenes se identifica un punto p del objeto en movimiento, es posible calcular la cantidad de pixeles que se desplaza p dentro de la imagen. Sin embargo, un desplazamiento hacia adelante o hacia atrás (en la coordenada z) no se puede detectar con facilidad. Esto se debe a que el punto p a diferente distancia en la dirección z se puede proyectar en las mismas coordenadas (x, y) de la cámara, como se muestra en la figura 2(a), haciendo indistinguible ese movimiento.
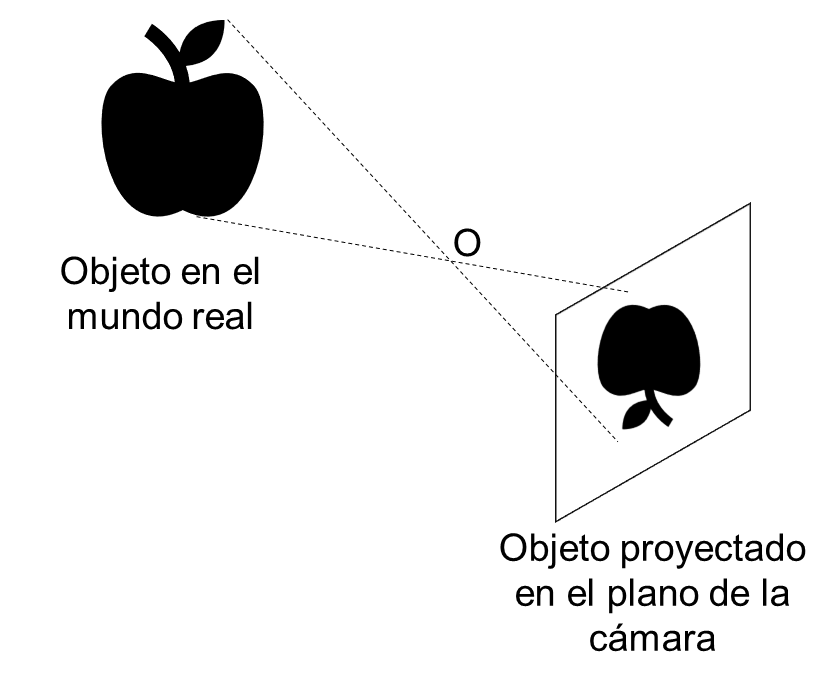
Si se agrega una segunda cámara que “observa” el mismo objeto desde otro ángulo, al desplazar el punto p, éste se proyectará en diferentes coordenadas de la segunda cámara, como se muestra en la figura 2(b). De este modo, si se conocen algunos datos de las cámaras tales como el tamaño de los pixeles, distancia focal (distancia perpendicular del punto O al plano de la cámara en la figura 1), la distancia y rotación entre las cámaras, es posible estimar la ubicación del punto p con respecto a la cámara, en coordenadas del mundo real. El procedimiento para estimar dicha ubicación se conoce como triangulación y se basa en algunos conceptos de geometría (tales como la semejanza de los triángulos que se forman en la figura 1), álgebra y trigonometría; también se requieren métodos de procesamiento de imágenes y reconocimiento de patrones para identificar el mismo punto p en ambas imágenes.
Algunas ventajas de los sistemas de visión estereoscópica son:
- Si se consideran simultáneamente varios puntos del objeto en movimiento, además del desplazamiento, es posible conocer la rotación del objeto con respecto a las imágenes anteriores, en una secuencia de video.
- No hay error acumulado; el error solamente depende del proceso de medición en cada instante.
- Comparada con el Sistema de Posicionamiento Global (GPS, por sus siglas en inglés), presenta menor margen de error. Además, la tecnología GPS es susceptible a interferencias, sobre todo en lugares rodeados de edificios, bajo puentes o en interiores.
Enlaces de referencia
Revista_de_Ingenieria_Innovativa_V3_N10_3.pdf (ecorfan.org)
3D Distance Measurement from a Camera to a Mobile Vehicle, Using Monocular Vision (hindawi.com)